|
This website will not be updated after 07/2021. For our new lab webiste, please go to
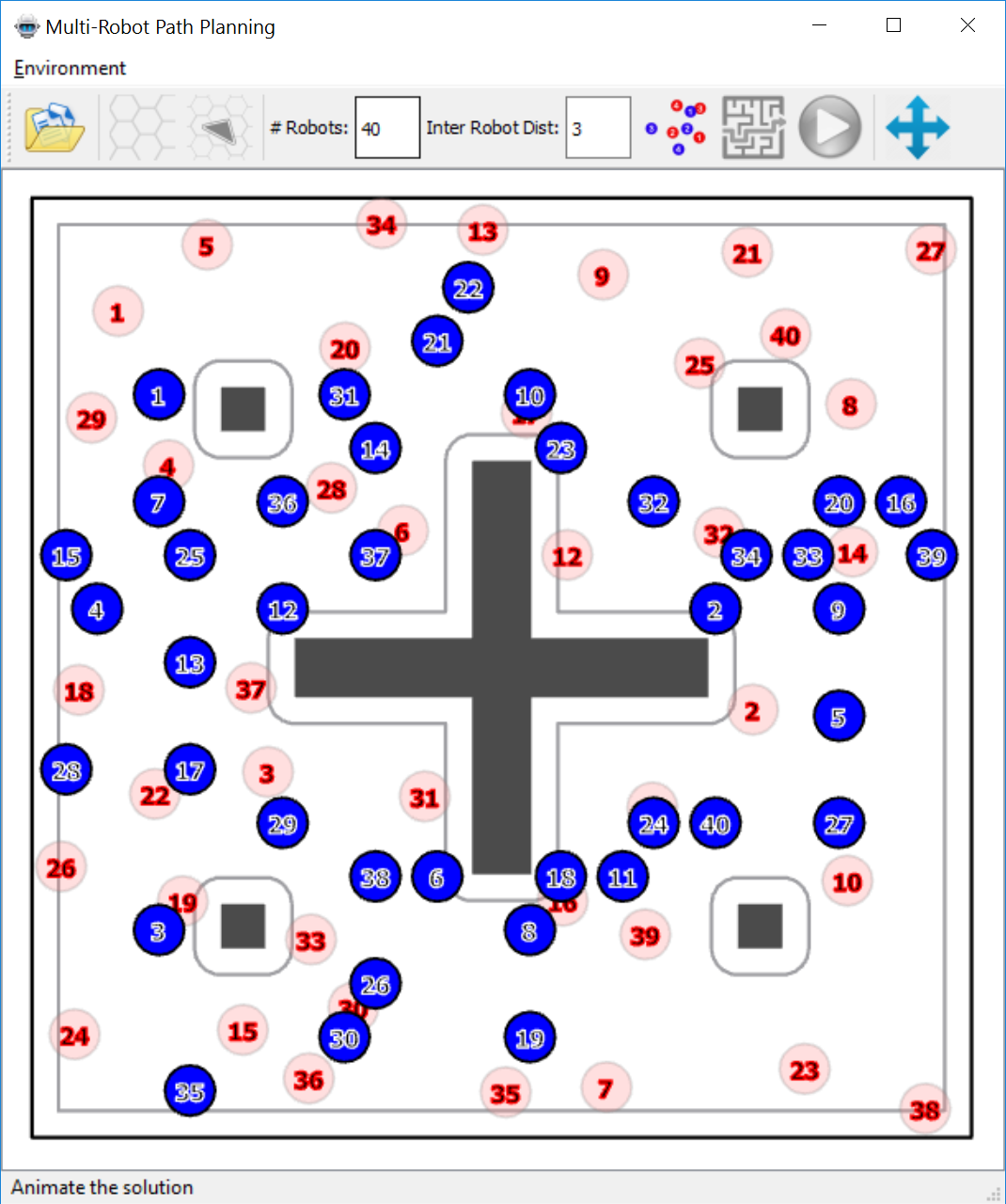
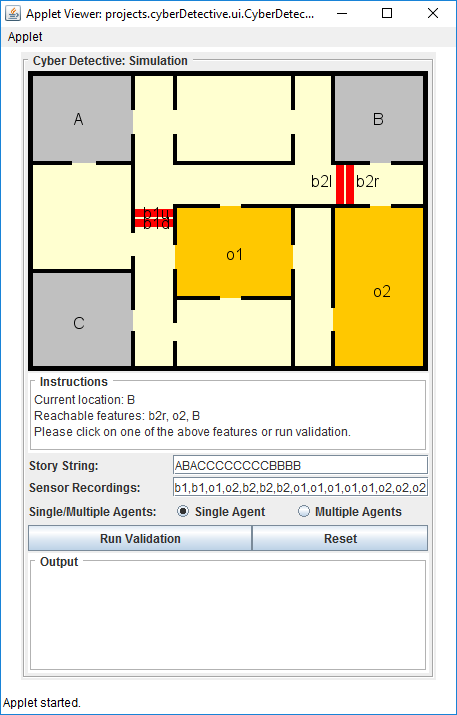
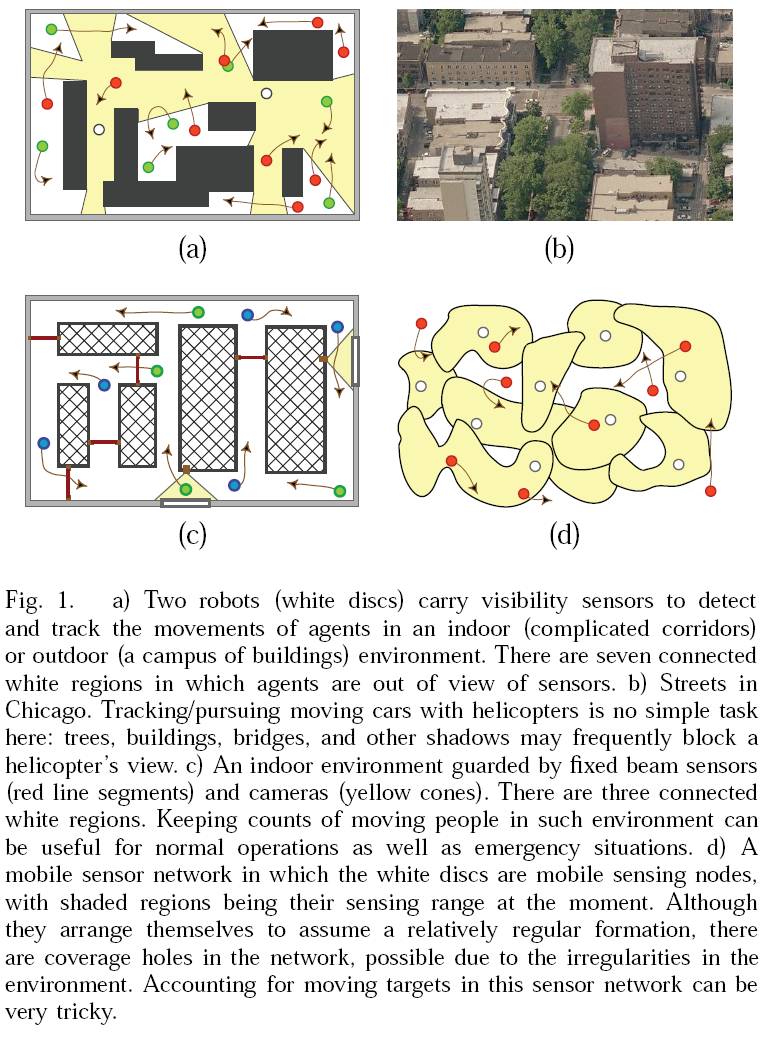
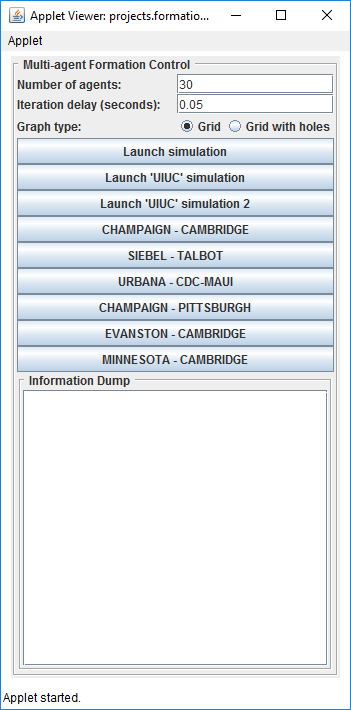
https://arc-l.github.io. Please see our github page for code releases after 2019. Here you will find links to source code and binaries as part of publications. Documentation, sometimes limited, can be found by following the individual link. For github hosted code, check the README.MD file on the repository page. Source and instructions: microMVP page Cross platform C++ source code with UI (via Qt) for near-optimal multi-robot path planning in 2D continuous domain. [screen shot] Source: GitHub Publication(s): J. Yu and D. Rus. An Effective Algorithmic Framework for Near Optimal Multi-Robot Path Planning. Source code used in the validation of the Correlated Orienteering model for estimating spatially correlated scalar field that change over time. Source: GitHub Publication(s): J. Yu, M. Schwager, and D. Rus. Correlated Orienteering Problem and its Application to Persistent Monitoring Tasks. Network flow based model for multi-robot path planning on graphs. There are two versions, one for the initial conference publication and one for the journal version that is significantly extended. Source: GitHub Publication(s): J. Yu and S. M. LaValle. Optimal Multi-Robot Path Planning on Graphs: Complete Algorithms and Effective Heuristics. Source: GitHub Publication(s): J. Yu and S. M. LaValle. Planning Optimal Paths for Multiple Robots on Graphs. Code for the validation of an agent (person/robot) log (story for a person, activity/spec for a robot) against networked sensors in the environment. Sensor fusion is achieved through the construction of an automaton from the sensor log combined with the environment geometry. The log is then validated against the automaton. [screen shot] Source: GitHub Publication(s): J. Yu and S. M. LaValle. Cyber Detectives: Determining When Robots or People Misbehave. Source code for computing visibility polygons and Ford-Fulkerson for computing max flow. [screen shot] Source: GitHub Publication(s): J. Yu and S. M. LaValle. Shadow Information Spaces: Combinatorial Filters for Tracking Targets. J. Yu and S. M. LaValle. Tracking hidden agents through shadow information spaces. Binaries for demonstrating distance optimal formation path planning algorithms based on network flow. Screen shots: [applet] [21x21 grid] [large instance] Binary: link to download Publication(s): J. Yu and S. M. LaValle. Shortest Path Set Induced Vertex Ordering and its Application to Distributed Distance Optimal Formation Planning and Control on Graphs. J. Yu and S. M. LaValle. Distance Optimal Formation Control on Graphs with a Tight Convergence Time Guarantee. Binaries for simulating the rendezvous behavior of Dubins Car agents. Screen shots: [applet] [simulation] [lyapunov function] Binary: link to download Publication(s): J. Yu, S. M. LaValle, and Daniel Liberzon. Rendezvous without Coordinates. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}